
由于柔性致动器比刚性执行器具有更好的接触柔顺性、更低的重量和阻力,所以柔性致动器在机器人和可穿戴触觉领域越来越流行。业界已经探索了一系列为柔性致动器提供动力的不同能源,包括流体驱动、静电驱动、电磁驱动和热驱动。
由于其高能量密度和低阻力,柔性流体致动器广泛用于可穿戴设备,而相关文献主要探讨了恒定流体压力控制(CFPC)来控制柔性致动器。这种控制方法使用简单的驱动结构(每个致动器一个离散阀)和二元(开-关)控制机制,允许致动器压力追踪动态负载下的流体源压力。
然而,CFPC因此而具有几个局限性:(1)有限的动态范围:柔性致动器提供的力的动态范围有限,并且仅受其工作压力控制,因为致动器压力只能在源压力和大气压力之间切换;(2) 致动器响应缓慢:柔性执行器的充气和放气响应时间由源压力决定,不能独立调节。(3) 低压控制分辨率:这种类型的控制只能实现致动器压力的二进制控制。(4) 非自然的触觉交互:只可能实现主动或外源控制致动器压力,它与用户和致动器的交互方式没有内在联系,从而导致非自然的触觉交互。
为了解决所述限制,美国西北大学和Meta在名为《Constant Fluidic Mass Control for Soft Actuators Using Artificial Neural Network Algorithm》的论文中提出了一种恒定流体质量控制(CFMC),其中恒定质量的流体困在致动器内。当用户与致动器交互时,由于这种交互导致的致动器压力任何变化可进一步帮助改善触觉交互。与使用压力传感器和第一原理模型估算流体质量的文献不同,团队是通过精确控制阀门的定时,并将其困在致动器内来调节流体质量。
使用CFMC的模拟压力控制需要整个射流系统(包括致动器)的可靠模型。有其他研究人员开发了基于第一性原理的理论模型来预测致动器行为,但所述模型只能在有限的输入集合中近似致动器的行为,不能可靠地捕捉流体系统中的所有非线性,因此很难对不同的柔性致动器进行泛化。在研究中,美国西北大学和Meta为可穿戴触觉提出了一种新的流体驱动方案CFMC。
据介绍,这种方法允许更大的动态范围、更快的响应时间和柔性致动器的模拟压力控制,并产生更自然的触觉交互。研究人员实现了一个射流系统来演示CFMC方法,并使用系统对柔性致动器进行了实验。另外,团队提出了一种基于神经网络的有监督学习算法,使模拟压力控制的柔性致动器使用CFMC,并泛化到新的致动器。
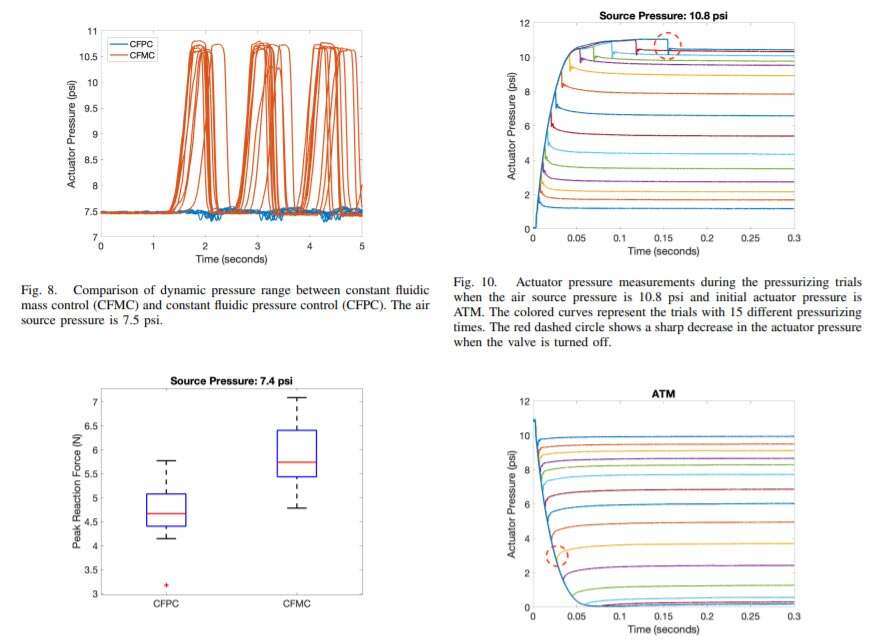
实验将CFMC与CFPC方法进行了比较。结果表明,CFMC可以增加柔性致动器的动态范围,缩短其响应时间以达到所需的压力,并实现模拟压力控制,从而提供更自然的触觉反馈。
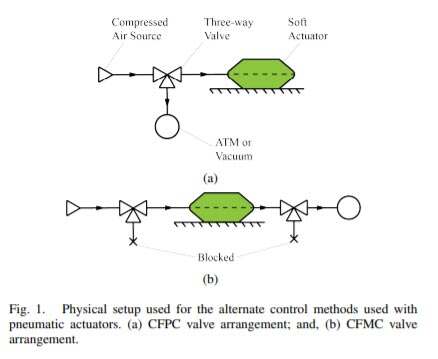
图1显示了CFPC和CFMC的射流实现。这两种实施方式之间的根本区别在于,在CFPC中,致动器压力只能存在于源或大气压力(ATM)状态,而在CFMC中,致动器可以与源和大气断开,因此保持与源和大气不同的状态。
CFPC使用一个三通阀,使致动器通过调节阀连接到压缩空气源。另一方面,CFMC采用两个三通阀:一个供气阀控制压缩空气的进气,另一个排气阀控制通向ATM的排气。CFMC然后根据流体源压力和初始致动器压力,通过改变两个阀门的开/关时间来调节致动器内的流体质量。CFMC同时可以使用两个双向阀实现。对于选择三通阀实现,是因为所述阀门的可用性。
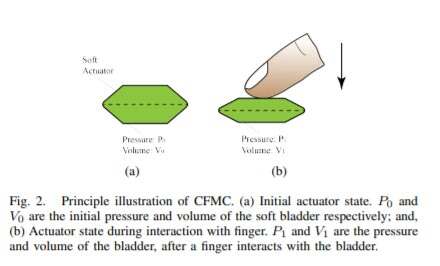
图2显示了CFMC的原理图。柔性气囊的初始压力和体积分别表示为P0和V0。当手指与柔性气囊相互作用时,柔性气囊的压力和容积分别变为P1和V1。假设系统在等温条件下遵循理想气体定律,这对于封闭系统意味着:
P0 × V0 = P1 × V1
P0 × V0 = (P0 + ∆P) × (V1 + ∆V )
假设g ∆P × ∆V ≈ 0,则等式2可以简化为:
∆P = −∆V × P0/V0
在CFPC中,当手指与柔性气囊互动时,柔性气囊体积减小至V1。由于这种相互作用(等式3),压力开始增加,致动器的流体路径对恒压流体源保持开放,从而使致动器压力在源压力下保持恒定(P0)。在CFMC中,当手指与柔性气囊相互作用时,柔性气囊体积减小,从而导致气压升高(等式3)。然而,由于空气被困在致动器内,并且从致动器到调节器的流体路径被阻断,因此压力的增加与体积的减少成正比,与初始致动器体积成反比。
当忽略CFPC和CFMC之间的接触面积差异时,CFPC和CFMC之间的作用力差异将取决于相应致动器压力的差异。因此,使用CFMC可实现的力的动态范围比CFPC大。
CFMC的另一个优点是,它允许源压力高于致动器的工作压力,从而能够缩短致动器的充气时间。另一方面,在CFPC中,源压力由致动器的工作压力决定。另外,与CFPC不同的是,CFPC只允许对致动器压力进行二进制控制,而CFMC允许对柔性致动器进行更精确的模拟压力控制。
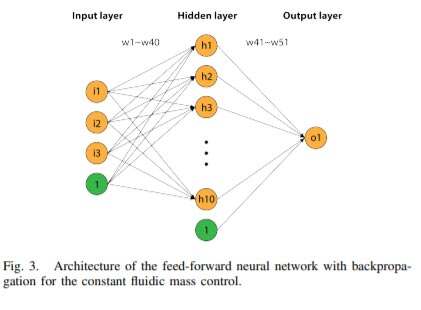
然而,由于柔性致动器的电容通常为非线性,并且流体系统中存在许多其他非线性,所以很难用第一原理模型以广义方式捕捉,因此研究人员使用基于神经网络的监督学习算法来实现使用CFMC的模拟压力控制。
例如,具有可压缩流体的气动电容器的压差和流量之间的二次关系,致动器材料非线性力位移行为对流体电容的贡献,流体管道的分布电阻和电容以及高压差下的流量阻塞是气动系统中存在的一定非线性现象。
为了比较CFMC和CFPC,研究人员使用相同的实验装置进行了两个实验。实验1比较了CFMC和CFPC之间致动器压力的动态范围,以及相互作用期间致动器产生的反作用力。实验2研究了基于CFMC学习神经网络模型的柔性致动器的充气/放气响应时间和模拟压力控制。

团队在所述实验中使用了两个具有不同电容的定制软流体致动器(图6),这代表了我们在大多数触觉应用中会看到的各种电容。致动器由热密封尼龙背衬TPU织物制成原型,并用于开发充气气囊。实验1和实验2使用了具有小电容的柔性致动器(图6a),并且使用了较大电容的柔性致动器(图6b)来检验所提出的控制方法的通用性。
这项研究证明了CFMC之于CFPC的多种优势,但所述优势是以额外的控制基础设施为代价。为了精确控制执行器空气压力控制,团队需要额外的设备,例如配备附加的阀门和压力传感器,并且需要更复杂的控制策略。另外,由于CFMC能够实现更大的动态范围,因此需要设计柔性致动器以处理更大的压力范围。
总的来说,研究人员提出了一种新的柔性流体致动器控制方法CFMC,它使用两个阀门的布置来保持致动器内恒定的流体质量,而且它在可穿戴触觉中具有潜在优势。研究分析表明,与CFPC相比,CFMC使致动器输出力的动态范围更大,对充气和放气的响应时间更快。
另外,团队演示了一种基于CFMC的模拟压力控制的实现方法,使用了一种基于学习神经网络的算法,从而允许精确调节执行器压力。实验同时表明,所述方法可以泛化到不同的TPU织物流体驱动器。
团队最后补充道,柔性致动器的外部交互力是可穿戴触觉应用中的常见情况,作用在致动器上的不同力会影响其等效电容,从而降低学习神经网络模型的精度。在未来,研究人员计划通过引入预载作为第四个输入变量来扩展所提出的神经网络模型,并探索递归神经网络的架构,以在控制系统中包含具有时间动态行为的输入变量。另外,团队计划探索基于CFMC的可穿戴触觉设备模拟压力控制,并计划检查CFMC在创建刚度触觉方面的影响,以及闭环控制的性能。
文章来源:映维网



评论